Very often high full well capacity and high dynamic range is mentioned in one sentence. However actually they are not per definition the same. For example at Adimec we do sell cameras with high full well capacity, however, if you are looking for a high dynamic range this might not be the camera of your choice. So what is the difference and when do you choose one over the other.
What is the difference?
The difference is in the noise! Dynamic range is defined as full well divided by dark noise. A camera with a high full well but also a high noise will thus not have a high dynamic range.
Let’s take a look at an example. CMOSIS has a 2 megapixel high full well sensor, the CSI2100, this sensor can be found in our Q-2HFW camera. It has a full well capacity of about 2 Me-. The dark noise in this sensor is about 945 e-. It thus has a dynamic range of about 66 dB (20*LOG[2 Me- / 945 e-]).
Now we can compare this with a normal 2 megapixel sensor from CMOSIS, the CMV2000. In the specifications we find a full well of 13.500 e- and a dark noise of 13 e-. The dynamic range is thus 60 dB. While the full well is thus different by a factor 148, the dynamic range only differs by a factor of 2 (6 dB).
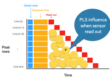
The CMV2000 even has a high dynamic range (HDR) mode which according to the specifications expands the dynamic range up to 90 dB. With the assumption that the noise does not change, this 90 dB dynamic range would be equivalent to a full well of 400.000 e-. This is a factor 5 smaller compared to the high full well sensor while the dynamic range is higher. Please note that we speak about an equivalent full well as the actual full well of 13.500 e- does not change. The higher dynamic range is achieved by settings in the pixel electronic circuit.
When to use a high full well camera or a high dynamic range camera?
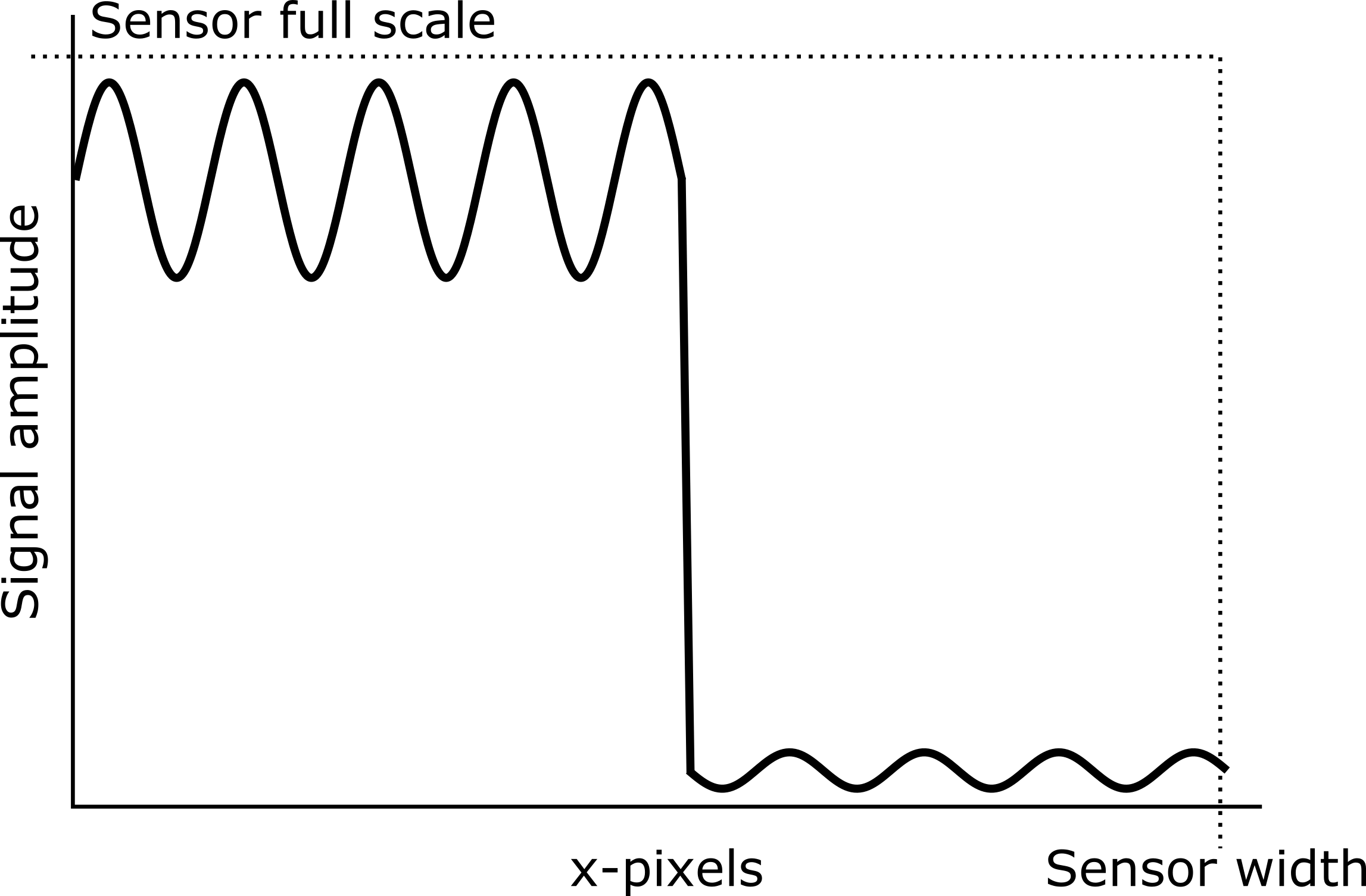
The high full well sensor is specially designed for situations in which the shot noise limits your measurement and where you are interested in a small signal hidden in a large bright background. The large bright background basically is part of your signal. The best result would be obtained if you always work in a situation in which your sensor is almost saturated. A typical signal is visualized below:
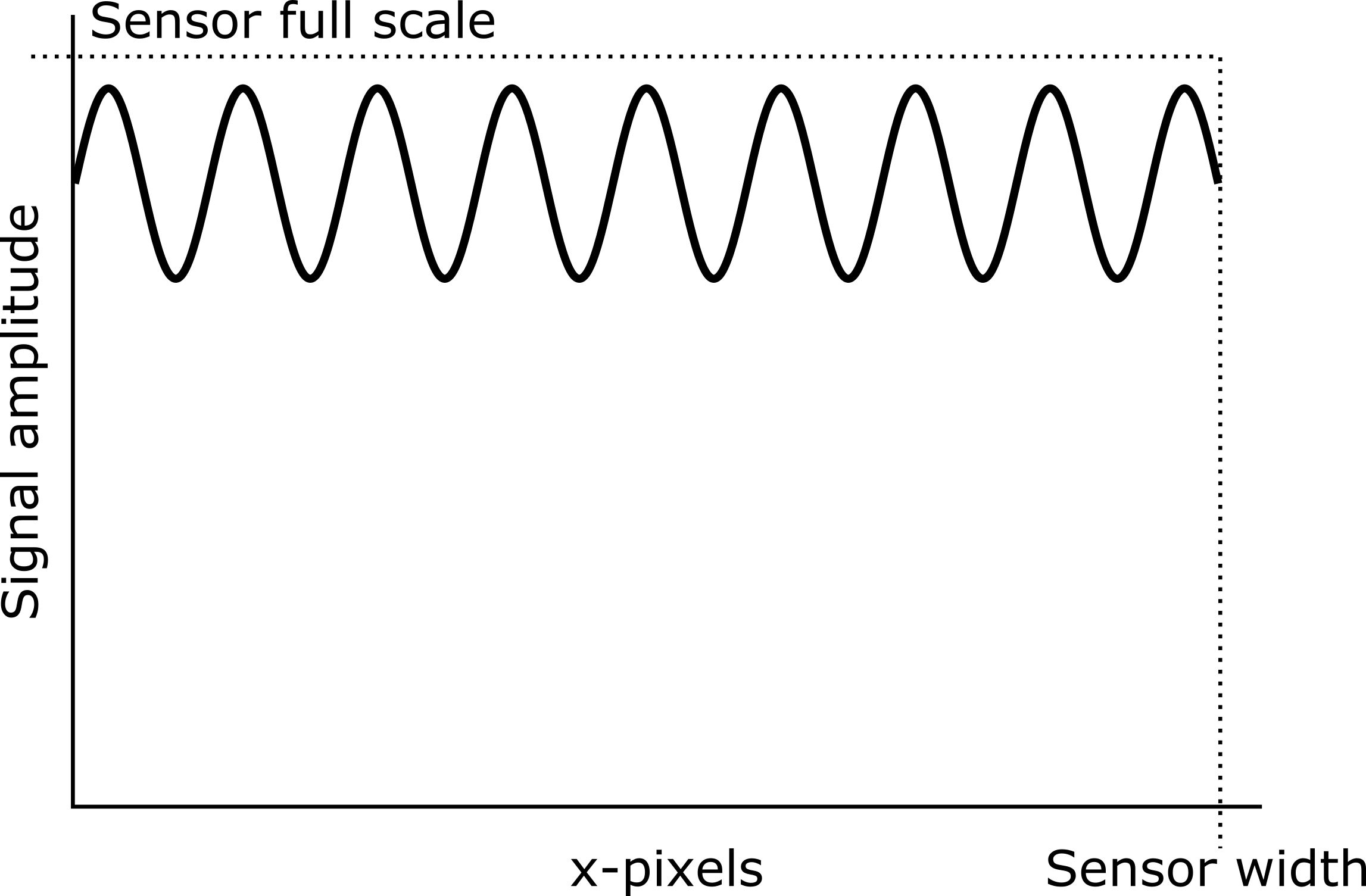
A typical signal that is best detected with a high full well capacity camera
Example measurement methods were these kinds of situations occur are white light metrology, heterodyne detection, and optical coherence tomography.
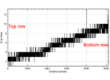
A high dynamic range is required once you are interested in low intensity signals as well as high intensity signals, i.e. when you require a high contrast. Again this is best explained by an image:
A typical signal that is best detected with a high dynamic range camera
This kind of signals could occur if there are highly reflective components next to non-reflective components: metal components versus plastic components.
In conclusion: High dynamic range is not the same as high full well. Cameras can be optimized for both. High full well is important when you have a lot of light that basically carries your real signal while a high dynamic range is important if you are interested in a high contrast: bright and low light signals at the same time.