日本語
日本語 English
English 简体中文
简体中文Binning and averaging to reduce shot noise in the Adimec QUARTZ cameras
Shot noise interference can be reduced by two techniques or a combination thereof: binning and averaging. In Adimec’s QUARTZ cameras, both functions can achieve shot noise improvements of up to +12 dB in addition to the performance of the CMOSIS sensor. With binning, the resolution of the camera will be decreased but the maximum camera frame speed remains intact. Using frame averaging, the resolution of the camera will remain the same but the maximum frame speed of the camera drops. A compromise between shot noise improvement through averaging and speed can be found by applying ROI imaging (e.g. ROI imaging increases the acquisition speed of the camera which can be used to compensate for the drop in speed by averaging).

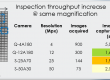
Frame Speed of the Adimec Q-4A180 for various shot noise improvement scenarios
Shot noise is caused by randomly arriving photons on the surface of the sensor. The average amount of the shot noise equals the square root of the signal. As a result, shot noise is a noise source to take into account, especially in applications where the measurement relies on detecting details in the lighter parts of the image.
In the past, shot noise critical measurements were often addressed in cameras through the use of sensors with high full well, e.g. 40kel and higher. Although shot noise dominance can be controlled this way, acquisition speeds are often too low for today’s needs. Sensors that are able to address the speed needs, in general, have low full well levels in order to achieve their performance. As these sensors also have lower read noise levels, similar and even better dynamic ranges are achieved. But this dynamic range number can be misleading: shot noise at lower full well levels becomes a more dominant noise source, impacting accurate detections in ‘white’.
Why shot noise reduction in camera is better than in PC
Reducing shot noise in the camera instead of in the PC has two main advantages for your system. First, it reduces the data rate load on the camera interface and PC-framegrabber processing. Averaging in the camera lowers the effective frame speed over the interface depending on the amount of averaged images. This allows for cost optimizations within the system connectivity infrastructure, as lower-speed interfaces can be used.
Secondly, averaging within the QUARTZ camera is performed with a bit depth and frame speed not possible in Camera Link-based framegrabber environments. High data rates with Camera Link are restricted to 8 bits per pixel. Averaging in the PC/framegrabber at high acquisition speeds (> 80 fps with 4Mpx) is therefore based on 8 bits input only, whereas the (QUARTZ) camera uses the full 10 bits from the sensor. This makes for higher accuracy in averaging results.

No Average Average (+10dB)
By using these techniques, the user gains control over optimal trade-offs between speed, resolution and accuracy without requiring different cameras optimized for speed or accuracy, which has traditionally been the case. In addition, the embedding of this processing in the camera yields accuracy and cost optimization benefits not possible in existing Camera Link environments.
For more detailed information about the Adimec QUARTZ cameras, request the product specification document: