日本語
日本語 English
English 简体中文
简体中文The changes in PCB manufacturing with smaller chips, different packages, higher density printed circuit board, and multi-layered, and more complex boards are resulting in the migration from 2D to 3D measurements. Here we provide more details on the machine vision camera requirements to enable this change.
With just a 2D view from the top, one can only see defects such as shifts, rotations, and cracks, but not whether components are flat on the board or the volume of solder paste. With this only 1 image was required to get all of the measurements.
While some 3D measurement systems may use 4-5 images per inspected ROI, more advanced systems use 20 images or even more to increase measurement accuracy and to add color vision.
The migration from 1 image for measurement, to multiple images results in more demands on the camera-based imaging system. There can be at least two approaches to satisfy these requirements.
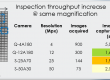
Option 1 – higher resolution cameras
Higher resolution cameras allow for a larger area to be inspected at once and provide more data, which can improve accuracy. BUT since many images are required to perform quantitative measurements and the overall system throughput must be maintained, the camera frame rate must also be high. (for example 4 Megapixel at 180 fps or even 25 Megapixel at 32 fps and higher).
Since multiple images are combined, the stability and reproducibility in the camera is more critical than in the past. Only intentional changes can occur between the images. This means black level, gain, among others must be exactly the same for all of the images. These parameters are all controlled through careful design and implementation by the camera manufacturer.
Option 2 – multiple cameras
Another option to reach these goals is through multiple cameras to capture all of the images. This could mean fewer illuminators and less stringent requirement on the speeds of the camera. This is attractive as it allows for scalability using more cameras for higher end systems, and can seem more cost effective since “lower-end” cameras can be used. This should be done with caution though as the cameras can have lower frame speed, but need to be extremely consistent, and well-matched for this technique to be accurate.

Regardless of the specific implementation, 3D measurements mean increasing demands on the performance and reliability of the machine vision camera. We welcome the challenge!